
In het vorige onderwerp"Classificatie van elektromotoren", heb ik de verschillende typen van de geborstelde gelijkstroommotor (BDC) uitgelegd, zoals in het volgende diagram:

Vandaag zal ik de borstelloze DC-motor (BLDC) en de AC-inductiemotoren als volgt uitleggen.
U kunt de volgende gerelateerde onderwerpen bekijken voor beoordeling en een goede aanhang.
Basiscomponenten van elektrische motoren
2- Borstelloze gelijkstroommotoren
|
Borstelloze DC-motoren |

In gelijkstroommotoren met borstels zijn de mechanische commutator en de bijbehorende borstels om verschillende redenen problematisch:
Borstelslijtage treedt op en neemt dramatisch toe in een omgeving met lage druk.
Vonken van de borstels kunnen explosies veroorzaken als de omgeving explosieve materialen bevat.
RF-ruis van de borstels kan interfereren met nabijgelegen tv-toestellen of elektronische apparaten, enz.
Borstelloze gelijkstroom (BLDC) motoren zijn een van de motortypes die snel aan populariteit wint. BLDC-motoren worden gebruikt in industrieën zoals apparaten, automobiel, ruimtevaart, consumenten, medisch, industriële automatiseringsapparatuur en instrumentatie.
Zoals de naam al aangeeft, gebruiken BLDC-motoren geen borstels voor commutatie; in plaats daarvan worden ze elektronisch gecommuteerd.
BLDC-motoren hebben veel voordelen ten opzichte van geborstelde gelijkstroommotoren en inductiemotoren, een paar hiervan zijn:
Betere snelheid versus koppelkarakteristieken.
Hoge dynamische respons.
Hoge efficiëntie.
Lange levensduur.
Geruisloze werking.
Hogere snelheden.
Bovendien is de verhouding van het geleverde koppel tot de grootte van de motor hoger, waardoor het nuttig is in toepassingen waar ruimte en gewicht kritische factoren zijn.
Bouw
BLDC-motoren zijn een type synchrone motor. Dit betekent dat het door de stator opgewekte magnetische veld en het door de rotor opgewekte magnetische veld met dezelfde frequentie roteren.
BLDC-motoren zijn verkrijgbaar in eenfasige, tweefasige en driefasige configuraties. Overeenkomstig zijn type heeft de stator hetzelfde aantal wikkelingen. Van deze zijn driefasige motoren het populairst en worden ze veel gebruikt.
1- stator
|
De stator van een BLDC-motor |

De stator van een BLDC-motor bestaat uit gestapelde stalen lamellen met wikkelingen die in de sleuven zijn geplaatst die axiaal langs de binnenomtrek zijn gesneden.
De meeste BLDC-motoren hebben drie statorwikkelingen die stervormig zijn aangesloten. Elk van deze wikkelingen is geconstrueerd met talrijke spoelen die onderling zijn verbonden om een wikkeling te vormen. Een of meer spoelen worden in de sleuven geplaatst en worden met elkaar verbonden om een wikkeling te maken. Elk van deze wikkelingen is verdeeld over de omtrek van de stator om een even aantal polen te vormen.
Afhankelijk van het vermogen van de stuurstroomvoorziening, kan de motor met de juiste nominale spanning van de stator worden gekozen. Motoren met een spanning van 48 volt of minder worden gebruikt in auto's, robotica, kleine armbewegingen, enzovoort. Motoren met 100 volt of hoger worden gebruikt in apparaten, automatisering en industriële toepassingen.
2- Rotor
|
De rotor van een BLDC-motor |

De rotor is gemaakt van een permanente magneet en kan variëren van twee tot acht poolparen met afwisselende Noord (N) en Zuid (S) polen.
|
BLDC-rotormagneetposities |
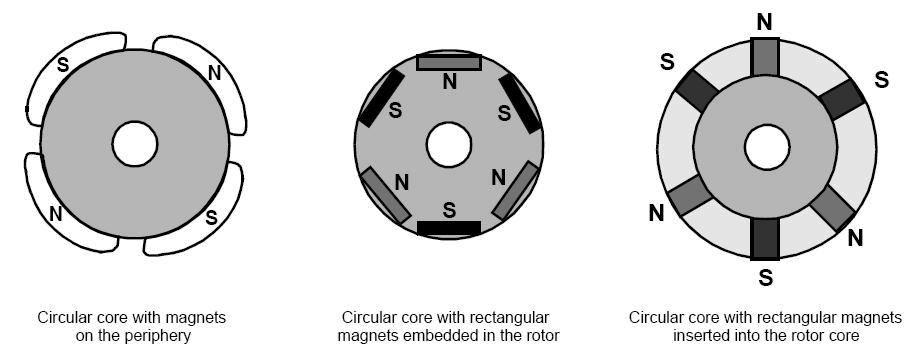
Op basis van de vereiste magnetische velddichtheid in de rotor wordt het juiste magnetische materiaal gekozen om de rotor te maken. Ferrietmagneten worden traditioneel gebruikt om permanente magneten te maken.
3- Hall-sensoren
|
BLDC Hall-sensoren |
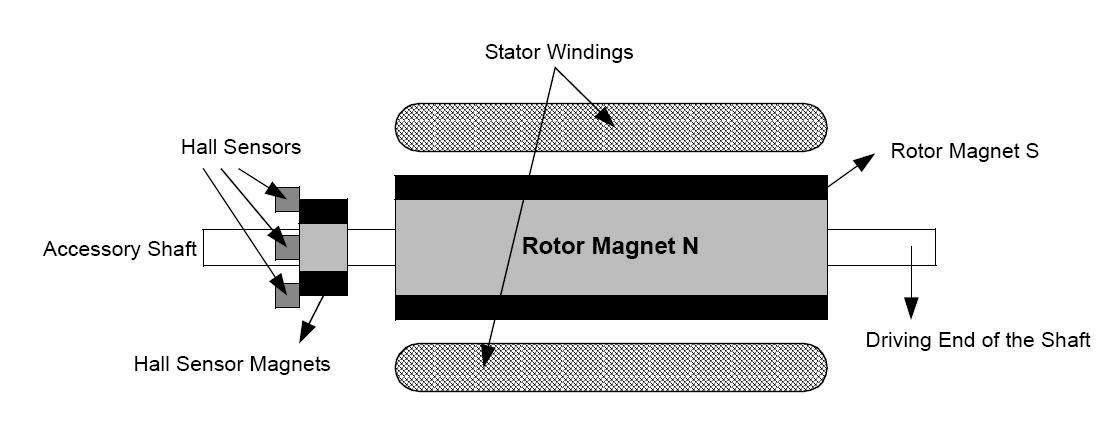
In tegenstelling tot een geborstelde gelijkstroommotor, wordt de commutatie van een BLDC-motor elektronisch geregeld. Om de BLDC-motor te laten draaien, moeten de statorwikkelingen in een volgorde worden bekrachtigd. Het is belangrijk om de rotorpositie te kennen om te begrijpen welke wikkeling wordt bekrachtigd na de bekrachtigingssequentie. De rotorpositie wordt gedetecteerd met behulp van Hall-effectsensoren die in de stator zijn ingebed.
De meeste BLDC-motoren hebben drie Hall-sensoren ingebed in de stator aan het niet-aandrijvende uiteinde van de motor.
Telkens wanneer de magnetische polen van de rotor in de buurt van de Hall-sensoren komen, geven ze een hoog of laag signaal, wat aangeeft dat de N- of S-pool in de buurt van de sensoren passeert. Op basis van de combinatie van deze drie Hall-sensorsignalen kan de exacte volgorde van commutatie worden bepaald.
Op basis van de fysieke positie van de Hall-sensoren zijn er twee uitvoerversies. De Hall-sensoren kunnen een faseverschuiving van 60° of 120° ten opzichte van elkaar hebben. Op basis hiervan definieert de motorfabrikant de commutatievolgorde die moet worden gevolgd bij het aansturen van de motor.
Opmerking: De Hall-sensoren hebben een voeding nodig. De spanning kan variëren van 4 volt tot 24 volt. De vereiste stroom kan variëren van 5 tot 15 bof.
Theorie van de werking
Elke commutatiereeks heeft een van de wikkelingen die wordt geactiveerd tot positief vermogen (stroom komt de wikkeling binnen), de tweede wikkeling is negatief (stroom verlaat de wikkeling) en de derde bevindt zich in een niet-bekrachtigde toestand.
Koppel wordt geproduceerd vanwege de interactie tussen het magnetische veld dat wordt gegenereerd door de statorspoelen en de permanente magneten van de rotor.
Om de motor draaiende te houden, moet het magnetische veld dat door de wikkelingen wordt geproduceerd, van positie veranderen, terwijl de rotor beweegt om het statorveld in te halen. Wat bekend staat als "Six-Step Commutation" definieert de volgorde van het bekrachtigen van de wikkelingen.
Bij een commutatie in zes stappen worden slechts twee van de drie borstelloze DC-motorwikkelingen tegelijk gebruikt. Stappen zijn gelijk aan 60 elektrische graden, dus zes stappen maken een volledige rotatie van 360 graden. Eén volledige lus van 360 graden kan de stroom regelen omdat er maar één stroompad is. Zesstapscommutatie is meestal nuttig in toepassingen die hoge snelheid en commutatiefrequenties vereisen. Een borstelloze gelijkstroommotor met zes stappen heeft gewoonlijk een lager koppelrendement dan een gecommuteerde sinusmotor.
Typische BLDC-motortoepassingen
We kunnen het type BLDC-motorbesturing in drie hoofdtypen indelen:
Constante belasting.
Variërende ladingen.
Toepassingen positioneren.
1- Toepassingen met constante belastingen:
Dit zijn de soorten toepassingen waarbij een variabele snelheid belangrijker is dan het op een ingestelde snelheid houden van de nauwkeurigheid van de snelheid. Bovendien veranderen de acceleratie- en deceleratiesnelheden niet dynamisch. Bij dit soort toepassingen is de belasting direct gekoppeld aan de motoras.
Onder dit soort toepassingen vallen bijvoorbeeld ventilatoren, pompen en blowers. Deze toepassingen vereisen goedkope controllers, die meestal in open-loop werken.
2- Toepassingen met wisselende belastingen:
Dit zijn de soorten toepassingen waarbij de belasting op de motor varieert over een snelheidsbereik. Deze toepassingen kunnen een hoge regelnauwkeurigheid en goede dynamische reacties vereisen.
Bijvoorbeeld,
Huishoudelijke apparaten: wasmachines, drogers en compressoren.
In auto's, brandstofpompregeling, elektronische stuurregeling, motorregeling en elektrische voertuigregeling.
In de ruimtevaart zijn er verschillende toepassingen, zoals centrifuges, pompen, robotarmbesturingen, gyroscoopbesturingen, enzovoort.
Deze toepassingen kunnen gebruikmaken van snelheidsfeedback-apparaten en kunnen in een semi-gesloten lus of een totale gesloten lus draaien.
3- Positioneringstoepassingen:
De meeste industriële en automatiseringstypes vallen onder deze categorie. De toepassingen in deze categorie hebben een soort van krachtoverbrenging, zoals mechanische tandwielen of tijdriemen, of een eenvoudig riemaangedreven systeem. Bij deze toepassingen is de dynamische respons van snelheid en koppel belangrijk. Ook kunnen deze toepassingen een frequente omkering van de draairichting hebben.
Deze systemen werken meestal in de closed-loop.
Ten slotte is een vergelijking tussen een Brushed DC-motor (BDC) en een Brushless DC-motor (BLDC) zoals weergegeven in de onderstaande afbeelding.

Ten tweede: AC-motoren
Wisselstroommotoren (AC) gebruiken een elektrische stroom die met regelmatige tussenpozen van richting verandert.
Het belangrijkste voordeel van DC-motoren ten opzichte van AC-motoren is dat de snelheid moeilijker te regelen is voor AC-motoren. Om dit te compenseren, kunnen AC-motoren worden uitgerust met aandrijvingen met variabele frequentie, maar de verbeterde snelheidsregeling gaat samen met een verminderde vermogenskwaliteit.
Soorten AC-motoren:

AC-motoren die tegenwoordig veel worden gebruikt, kunnen worden onderverdeeld in twee brede categorieën:
Inductie (asynchrone) motoren.
Synchrone motoren.
Lineaire motoren.
Deze twee typen motoren verschillen in de manier waarop de rotorveldexcitatie als volgt wordt geleverd:
Voor inductiemotoren is er geen extern toegepaste rotorexcitatie en wordt in plaats daarvan stroom geïnduceerd in de rotorwikkelingen vanwege het roterende magnetische veld van de stator.
Voor synchrone motoren wordt een veldexcitatie toegepast op de rotorwikkelingen. Dit verschil in veldexcitatie leidt tot verschillen in motorkarakteristieken, wat op zijn beurt leidt tot verschillende beveiligings- en besturingsvereisten voor elk motortype.
1- Inductiemotor
Inductiemotoren zijn de meest voorkomende motoren die worden gebruikt voor verschillende apparatuur in de industrie.
Inductiemotor: zo genoemd omdat de spanning in de rotor wordt geïnduceerd (dus geen borstels nodig), maar om dit te laten gebeuren, moet de rotor draaien met een lagere snelheid van het magnetische veld om het bestaan van een geïnduceerde spanning mogelijk te maken.
Daarom is er een nieuwe term nodig om de inductiemotor te beschrijven, namelijk de slip.
De slip:
Een aandrijfkoppel kan alleen bestaan als er een geïnduceerde stroom in de schermring staat. Het wordt bepaald door de stroom in de ring en kan alleen bestaan als er een fluxvariatie in de ring is. Daarom moet er een snelheidsverschil zijn in de schermring en het draaiveld. Daarom wordt een elektromotor die werkt volgens het hierboven beschreven principe een "asynchrone motor" genoemd.
Het verschil tussen de synchrone snelheid (Ns) en de schaduwringsnelheid (N) wordt "slip" (s) genoemd en wordt uitgedrukt als een percentage van de synchrone snelheid.
S= (Nsyn – Nm)/ Nsyn
Waar is de slip? Slip is een van de belangrijkste variabelen bij de besturing en bediening van inductiemachines.
s=0: als de rotor synchroon draait.
s=1: als de rotor stilstaat.
s is –ve: als de rotor draait met een snelheid boven de synchrone snelheid.
s is +ve: als de rotor draait met een snelheid onder de synchrone snelheid.
Voordelen:
Eenvoudig ontwerp, robuust, lage prijs, eenvoudig onderhoud.
Breed scala aan vermogens: fractionele pk's tot 10 MW.
Draai in wezen met een constante snelheid van onbelast tot vollast.
De snelheid is afhankelijk van de frequentie van de stroombron.
Meest populaire motor vandaag in het lage en middelhoge vermogensbereik.
Zeer robuust van constructie.
DC-motoren hebben vervangen in gebieden waar traditionele DC-motoren niet kunnen worden gebruikt, zoals mijnbouw of explosieve omgevingen. Van twee typen, afhankelijk van de motorconstructie; Eekhoornkooi of sleepring.
nadelen:
Het is niet gemakkelijk om variabele snelheidsregeling te hebben.
Vereist een vermogenselektronische aandrijving met variabele frequentie voor optimale snelheidsregeling.
De meeste van hen werken met een achterblijvende arbeidsfactor.
Werkingsprincipe:
De stator is meestal verbonden met het net en dus is de stator gemagnetiseerd.
Het magnetische veld van de stator snijdt de rotorwikkelingen door en produceert een geïnduceerde spanning in de rotorwikkelingen.
Omdat de rotorwikkelingen zijn kortgesloten, zowel voor de eekhoornkooi als voor de gewikkelde rotor, en geïnduceerde stroom vloeit in de rotorwikkelingen.
De rotorstroom wekt een ander magnetisch veld op.
Koppel wordt geproduceerd als gevolg van de interactie van die twee magnetische velden.
Bouw:
Een inductiemotor heeft twee hoofdonderdelen:
1- stator
|
Inductiemotorstator |

Dit is het onbeweeglijke deel van de motor. Een lichaam in gietijzer of een lichte legering herbergt een ring van dunne siliciumstalen platen (ongeveer 0,5 mm dik). De platen zijn van elkaar geïsoleerd door oxidatie of een isolerende vernis. De "laminering" van het magnetische circuit vermindert verliezen door hysterese en wervelstromen.
De platen hebben inkepingen voor de statorwikkelingen die het draaiveld zullen produceren om in te passen (drie wikkelingen voor een driefasenmotor). Elke wikkeling bestaat uit meerdere spoelen. De manier waarop de spoelen met elkaar zijn verbonden, bepaalt het aantal paren polen op de motor en daarmee de rotatiesnelheid.
2- Rotor
Dit is het mobiele deel van de motor. Net als het magnetische circuit van de stator, bestaat het uit op elkaar gestapelde platen die van elkaar zijn geïsoleerd en een cilinder vormen die vastzit aan de motoras.
Soorten inductiemotoren
|
Soorten inductiemotoren |

Inductiemotoren worden als volgt geclassificeerd volgens het rotortype:
A- Eekhoornkooirotor:

|
Eekhoornkooirotor |

Het bestaat uit dikke geleidende staven ingebed in parallelle sleuven. Deze staven worden aan beide uiteinden kortgesloten met behulp van kortsluitringen.
B- Wondrotor:

|
Wond Rotor |

Het heeft een driefasige, dubbellaagse, gedistribueerde wikkeling. Het is gewikkeld voor evenveel polen als de stator. De drie fasen zijn intern bedraad en de andere uiteinden zijn verbonden met sleepringen die op een as zijn gemonteerd met daarop rustende borstels.
Elk van de twee soorten inductiemotoren hierboven kan als volgt in twee hoofdgroepen worden ingedeeld:
I- Eenfasige inductiemotoren:
Deze hebben slechts één statorwikkeling, werken met een enkelfasige voeding, hebben een eekhoornkooirotor en hebben een apparaat nodig om de motor te starten. Dit is verreweg het meest voorkomende type motor dat wordt gebruikt in huishoudelijke apparaten, zoals ventilatoren, wasmachines en wasdrogers, en voor toepassingen tot 3 tot 4 pk.
Enkelfasige inductiemotoren worden ook geleverd met een gewikkelde rotor met uitstekende start- en acceleratie-eigenschappen, en ze zijn ideaal voor waarde-operators, landbouwmotortoepassingen, takels, vloeronderhoudsmachines, luchtcompressoren, wasapparatuur en mijnbouwapparatuur.
II- Driefasige inductiemotoren:
Het roterende magnetische veld wordt geproduceerd door de gebalanceerde driefasenvoeding. Deze motoren hebben een hoog vermogen, kunnen een eekhoornkooi of gewikkelde rotors hebben (hoewel 90% een eekhoornkooirotor heeft) en zijn zelfstartend. Geschat wordt dat ongeveer 70% van de motoren in de industrie van dit type zijn en worden gebruikt in bijvoorbeeld pompen, compressoren, transportbanden, zware elektrische netwerken en slijpmachines. Ze zijn verkrijgbaar in 1/3 tot honderden pk's.
Laten we nu de eerste classificatie van inductiemotoren bekijken op basis van de bovenstaande typen:
1- Eenfase, eekhoornkooi, inductiemotor:
Deze categorie heeft veel soorten zoals weergegeven in de onderstaande afbeelding.

A-gearceerde pool inductiemotoren
Constructie en werkingsprincipe:
|
Inductiemotoren met gearceerde pool |

Motoren met gearceerde pool hebben slechts één hoofdwikkeling en geen startwikkeling. Beginnen is met een ontwerp dat een continue koperen lus rond een klein deel van elk van de motorpolen ringen. Dit "schaduwt" dat deel van de pool, waardoor het magnetische veld in het gearceerde gebied achterblijft bij het veld in het niet-gearceerde gebied. Door de reactie van de twee velden gaat de as draaien.
Voordelen:
Omdat de motor met gearceerde pool geen startwikkeling, startschakelaar of condensator heeft, is deze elektrisch eenvoudig en goedkoop.
De snelheid kan alleen worden geregeld door de spanning te variëren of door een multi-tapwikkeling.
Mechanisch maakt de motorconstructie met schaduwrijke polen een productie van grote volumes mogelijk.
Deze worden meestal beschouwd als "wegwerpmotoren", wat betekent dat ze veel goedkoper zijn om te vervangen dan te repareren.
nadelen:
Het lage startkoppel is typisch 25% tot 75% van het nominale koppel.
Het is een motor met hoge slip met een loopsnelheid van 7% tot 10% onder het synchrone toerental.
Over het algemeen is het rendement van dit motortype erg laag (minder dan 20%).
Toepassingen:
De lage initiële kosten passen bij de gearceerde poolmotoren voor toepassingen met een laag vermogen of lichte toepassingen. Misschien is hun grootste gebruik in ventilatoren met meerdere snelheden voor huishoudelijk gebruik. Maar het lage koppel, het lage rendement en de minder robuuste mechanische eigenschappen maken motoren met een schaduwrijke pool onpraktisch voor de meeste industriële of commerciële toepassingen, waar hogere cyclussnelheden of continu bedrijf de norm zijn.
In het volgende onderwerp zal ik doorgaan met het uitleggen van andere soorten eenfasige, eekhoornkooi-inductiemotor. Dus blijf alsjeblieft volgen.





